Portfolio / SLAM Air Quality Robot
Software prototype
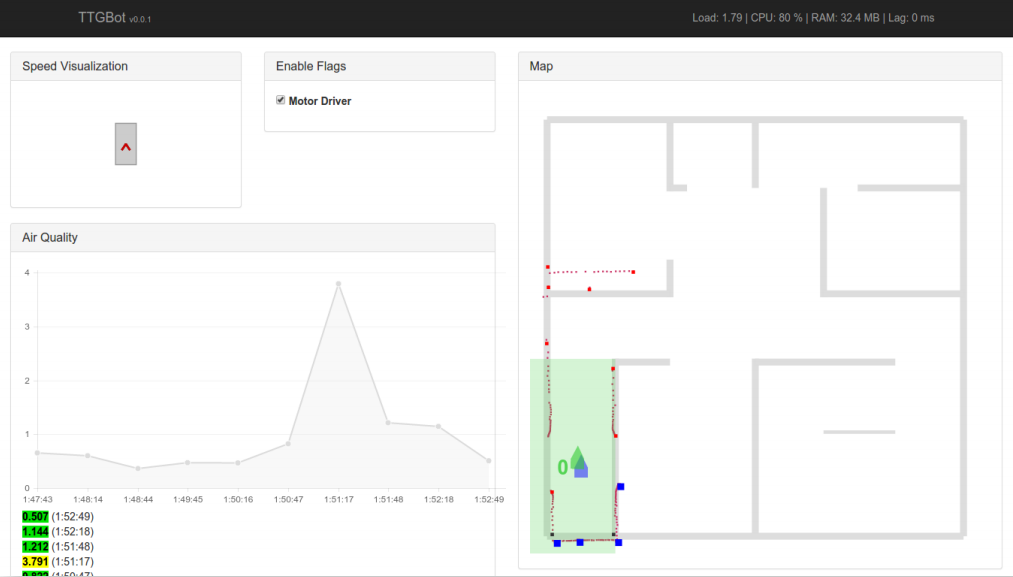
The final software prototype, showing a graph of recent air quality readings on the left, and a map of the test environment on the right. Grey lines are known locations of walls, red dots are readings from the LIDAR, large blue dots are landmarks identified in the LIDAR readings, and the arrow indicates the robot's current position. A 2D heat map of air quality was planned but there was insufficient time to implement it.
SLAM robot that monitors air quality in a cleanroom and maps it onto a web interface as a 2-dimensional heat map.
This is my capstone design project at Arizona State University. I wrote most of the code, designed the custom circuitry, and assisted the team leader with planning and scheduling. In particular I implemented a localization algorithm using LIDAR corner detection and dead reckoning. By pre-processing the map to build a cache of expected data it can run easily on low-power processors.